PhotoelasticBall:光弾性効果を用いたデジタルスポーツのためのボール型入力装置
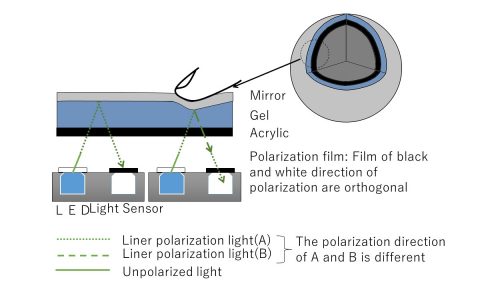
We propose a ball-type device using photoelastic effect. Photoelastic effect is one of the features many transparent gels have, and polarization state changes depending on the pressure when the gel is pressed. “PhotoelasticTouch”, developed in our laboratory, is tabletop interface for touch recognition using this effect. But it has some problem of miniaturization it needs to place a camera in order to observe the polarization. We improved it and developed new touch sensor. This sensor is very thin and able to process into various shapes. We report this sensor’s performance evaluation and recognition structure. デジタルスポーツとはスポーツ用具・フィールドに対して高度デジタル機器を融合させることによる,拡張されたスポーツのことである.例えばボールのバウンドにあわせてボールそのものやフィールドに映像効果を付与する,ボールの中に空気アクチュエータを搭載し,空中で飛行軌道を変化させるといったことが行われている.将来的にさらに高度な能力を有するスポーツ用具やフィールドが開発されると期待されるものの,それらの能力を効果的に活用するための,適切なコマンド入力手段は存在しない.本研究では特にボールに着目し,スポーツプレー中であってもコマンド入力を可能とする,全面全周囲圧力検出機能を組み込んだPhotoelasticBallを開発した.PhotoelasticBallはボール全面全周囲で圧力検出が可能であることから,ボールのどこを押下しても,その押下力の大きさと方向を検出することができる.すなわち,ボール全面がジョイスティックと同等の機能を有するものとなっている.このボールは本講座小池研究室のPhotoelasticTouchの技術に基づき構成されている. Publications: Kei Nitta, Toshiki Sato, Hideki Koike, Takuya Nojima, “PhotoelasticBall: A touch detectable ball using